If you are thinking of building a Web-controlled surveillance car using the ESP32 CAM module then this tutorial will help you out in building the same.
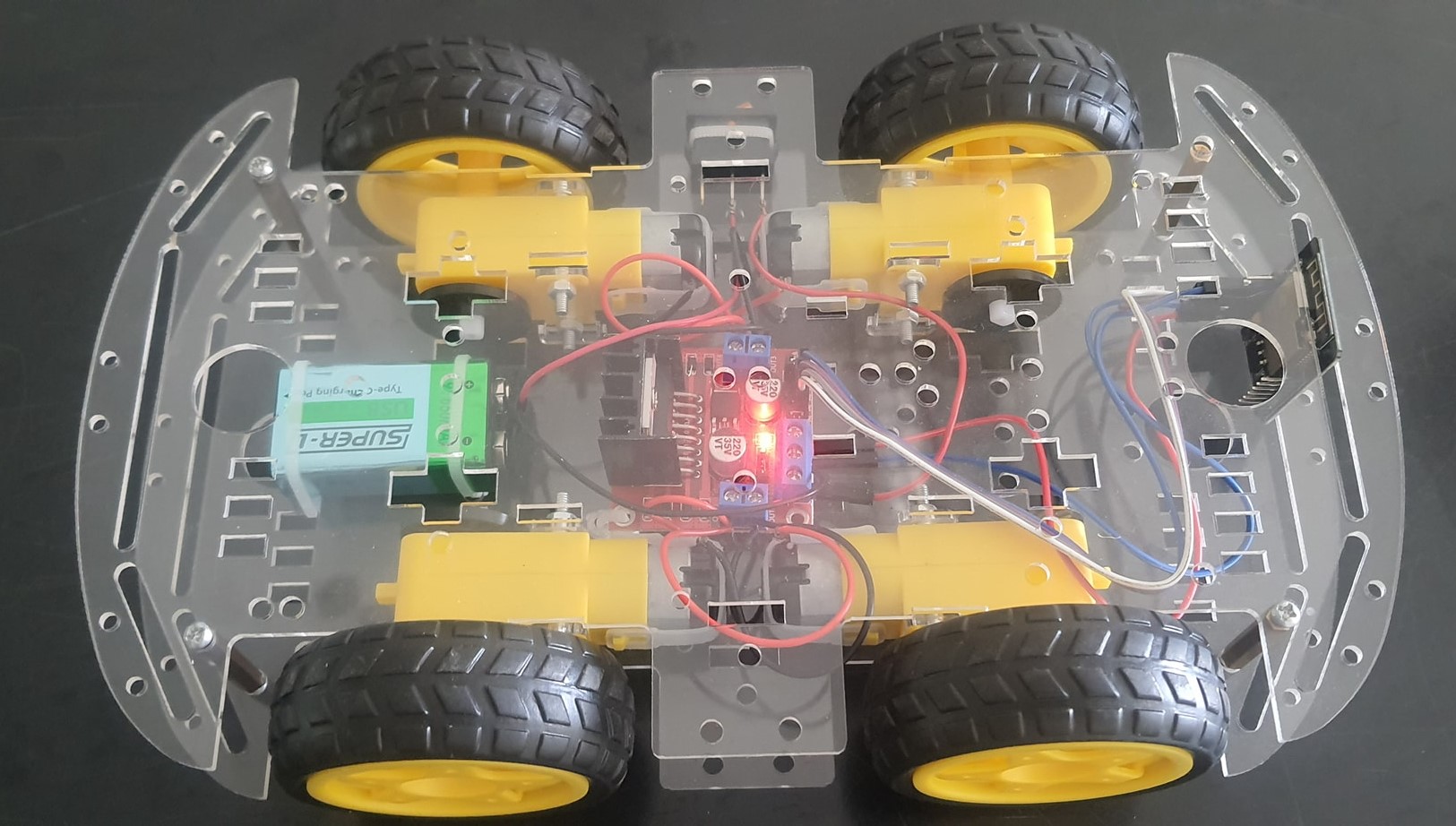
Web-controlled surveillance cars can be built using the ESP32-CAM module. Apart from the ESP32-Camera module, we will need 4 DC motors with its Robo car chassis and L293D motor driver module to build this Robocar. ESP32 is one of the popular boards to build IoT-based projects.
Here HTTP communication protocol is used to receive video streaming from the camera over the web browser using an IP address. The web page will also have buttons to move the car in Left, Right, Forward, and reverse directions and can vary the speed with light control as well. So let’s get started!
ESP32 CAM MODULE
The ESP32-CAM module comes with an ESP32-S chip, which has a very small size OV2640 camera and a microSD card slot on the board. MicroSD card slot can be used to image storage taken from the camera.

L298N MOTOR DRIVER MODULE

| Motor controller | L298N, drives 4 DC motors |
| Operating Voltage | 5- 35V |
| Logic voltage | 4.5 – 7 V |
| Max current | 2A per channel |
| Voltage Regulator | 78M05 |
| Module dimensions | 43 x 43 x 28 mm |
| Junction operating temperature | -25 to 130 o Celsius |
REQUIRED COMPONENTS
- ESP32 Camera Development Board
- USB to TTL 3.3V/5V FTDI Serial Adapter Module
- USB –A to micro-USB cable
- Car chassis
- L298 motor driver module
- 12V Battery
- On-Off- Switch
- DC Female Connector Jack
- Connecting wires
- Soldering iron
- Solder wire
Software Required
- Arduino IDE
CIRCUIT DIAGRAM
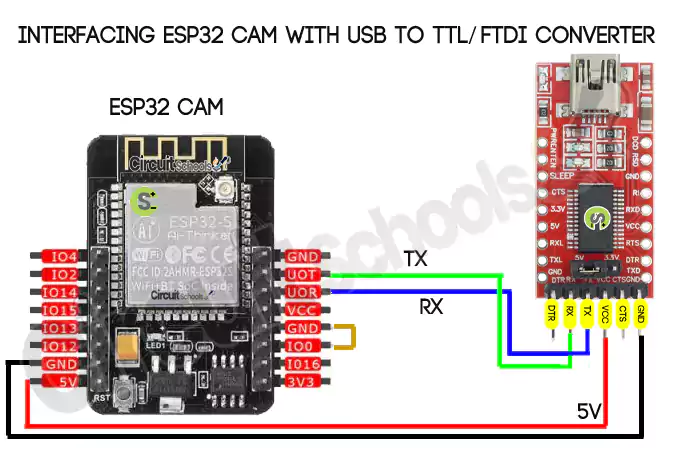
ESP32-CAM doesn’t have a USB connector, so you need an FTDI board to upload the code into the ESP32-CAM module. The VCC and GND pin of the ESP32 CAM module is connected with the VCC and GND pin of the FTDI board. The Tx and Rx of the ESP32 CAM module are connected with the Rx and Tx of the FTDI board.
| FTDI board | ESP32 CAM module |
| Vcc | 5v |
| GND | GND |
| Tx | VOR |
| Rx | VOT |
Note: Before uploading the code, you have to connect the IO0 to the GND. IO0 determines whether the ESP32 module is in flashing mode or not. When IO0 is connected to GND, the ESP32 goes into flashing mode.
To upload the code connect according to the following circuit diagram.
For connecting the ESP32 CAM module with L298N driver module
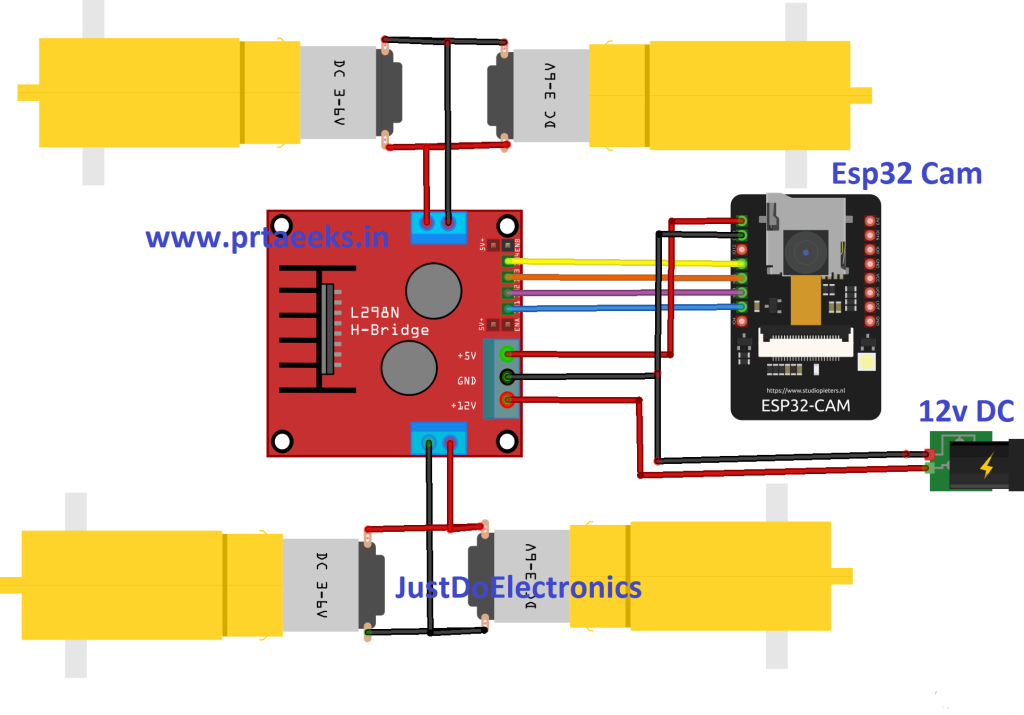
Follow this table in order to make your connections.
| L298N driver Pins | ESP32 CAM Pins |
| ENA | IO12 |
| IN1 | IO13 |
| IN2 | IO15 |
| IN3 | IO14 |
| IN4 | IO2 |
| ENB | IO12 |
For L298N motor driver module, motors are connected to the motor terminals of the motor driver module. The motor driver has another 3 terminals, in which one is 12Volt connected to the battery. The GND terminal is connected to the battery’s negative terminal and it is also connected to the ESP32 CAM GND pin and 5v is connected to 5v of the ESP32 CAM module.
INSTALL THE FOLLOWING LIBRARIES IN THE ARDUINO IDE
INSTALLING ESP32 BOARD ON ARDUINO IDE
We will program the ESP32-CAM using Arduino IDE. For that, we have to install the ESP32 add-on on Arduino IDE.
To install the ESP32 board in your Arduino IDE, go to File> Preferences

Now copy the below link and paste it into the ‘Additional Board Manager URLs’ , as shown in the image below. Then, click the “OK” button:
https://dl.espressif.com/dl/package_esp32_index.json

Now go to Tools > Board > Boards Manager

In Boards Manager search for ESP32 and install the “ESP32 by Espressif Systems“.

Install the latest version of it. Apply all the setting shown in the picture below.

Now you are ready to upload the code. Take the code as below and HIT the upload button.
ESP32CAM_Car.ino
#include "esp_camera.h"
#include <WiFi.h>
//#define Relay1 2
//#define Relay2 4 //led on board
//#define Relay2 14
//
// WARNING!!! Make sure that you have either selected ESP32 Wrover Module,
// or another board which has PSRAM enabled
//
// Adafruit ESP32 Feather
// Select camera model
//#define CAMERA_MODEL_WROVER_KIT
//#define CAMERA_MODEL_M5STACK_PSRAM
#define CAMERA_MODEL_AI_THINKER
const char* ssid = "THOTSAWAT"; //Enter SSID WIFI Name
const char* password = "12345678"; //Enter WIFI Password
#if defined(CAMERA_MODEL_WROVER_KIT)
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 21
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 19
#define Y4_GPIO_NUM 18
#define Y3_GPIO_NUM 5
#define Y2_GPIO_NUM 4
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
#elif defined(CAMERA_MODEL_AI_THINKER)
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
#else
#error "Camera model not selected"
#endif
// GPIO Setting
extern int gpLb = 2; // Left 1
extern int gpLf = 14; // Left 2
extern int gpRb = 15; // Right 1
extern int gpRf = 13; // Right 2
extern int gpLed = 4; // Light
extern String WiFiAddr ="";
void startCameraServer();
void setup() {
// pinMode(Relay1,OUTPUT);
// digitalWrite(Relay1,LOW);
// pinMode(Relay2,OUTPUT);
// digitalWrite(Relay2,LOW);
Serial.begin(115200);
Serial.setDebugOutput(true);
Serial.println();
pinMode(gpLb, OUTPUT); //Left Backward
pinMode(gpLf, OUTPUT); //Left Forward
pinMode(gpRb, OUTPUT); //Right Forward
pinMode(gpRf, OUTPUT); //Right Backward
pinMode(gpLed, OUTPUT); //Light
//initialize
digitalWrite(gpLb, LOW);
digitalWrite(gpLf, LOW);
digitalWrite(gpRb, LOW);
digitalWrite(gpRf, LOW);
digitalWrite(gpLed, LOW);
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
//init with high specs to pre-allocate larger buffers
if(psramFound()){
config.frame_size = FRAMESIZE_UXGA;
config.jpeg_quality = 10;
config.fb_count = 2;
} else {
config.frame_size = FRAMESIZE_SVGA;
config.jpeg_quality = 12;
config.fb_count = 1;
}
// camera init
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
return;
}
//drop down frame size for higher initial frame rate
sensor_t * s = esp_camera_sensor_get();
s->set_framesize(s, FRAMESIZE_CIF);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
startCameraServer();
Serial.print("Camera Ready! Use 'http://");
Serial.print(WiFi.localIP());
WiFiAddr = WiFi.localIP().toString();
Serial.println("' to connect");
}
void loop() {
//put your main code here, to run repeatedly:
// digitalWrite(Relay1,HIGH);
// delay(500);
// digitalWrite(Relay1,LOW);
// delay(500);
// digitalWrite(Relay2,HIGH);
// delay(500);
// digitalWrite(Relay2,LOW);
// delay(500);
}
app_httpd.cpp
// Copyright 2015-2016 Espressif Systems (Shanghai) PTE LTD
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
#include "esp_http_server.h"
#include "esp_timer.h"
#include "esp_camera.h"
#include "img_converters.h"
#include "camera_index.h"
#include "Arduino.h"
extern int gpLb;
extern int gpLf;
extern int gpRb;
extern int gpRf;
extern int gpLed;
extern String WiFiAddr;
void WheelAct(int nLf, int nLb, int nRf, int nRb);
typedef struct {
size_t size; //number of values used for filtering
size_t index; //current value index
size_t count; //value count
int sum;
int * values; //array to be filled with values
} ra_filter_t;
typedef struct {
httpd_req_t *req;
size_t len;
} jpg_chunking_t;
#define PART_BOUNDARY "123456789000000000000987654321"
static const char* _STREAM_CONTENT_TYPE = "multipart/x-mixed-replace;boundary=" PART_BOUNDARY;
static const char* _STREAM_BOUNDARY = "\r\n--" PART_BOUNDARY "\r\n";
static const char* _STREAM_PART = "Content-Type: image/jpeg\r\nContent-Length: %u\r\n\r\n";
static ra_filter_t ra_filter;
httpd_handle_t stream_httpd = NULL;
httpd_handle_t camera_httpd = NULL;
static ra_filter_t * ra_filter_init(ra_filter_t * filter, size_t sample_size){
memset(filter, 0, sizeof(ra_filter_t));
filter->values = (int *)malloc(sample_size * sizeof(int));
if(!filter->values){
return NULL;
}
memset(filter->values, 0, sample_size * sizeof(int));
filter->size = sample_size;
return filter;
}
static int ra_filter_run(ra_filter_t * filter, int value){
if(!filter->values){
return value;
}
filter->sum -= filter->values[filter->index];
filter->values[filter->index] = value;
filter->sum += filter->values[filter->index];
filter->index++;
filter->index = filter->index % filter->size;
if (filter->count < filter->size) {
filter->count++;
}
return filter->sum / filter->count;
}
static size_t jpg_encode_stream(void * arg, size_t index, const void* data, size_t len){
jpg_chunking_t *j = (jpg_chunking_t *)arg;
if(!index){
j->len = 0;
}
if(httpd_resp_send_chunk(j->req, (const char *)data, len) != ESP_OK){
return 0;
}
j->len += len;
return len;
}
static esp_err_t capture_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
int64_t fr_start = esp_timer_get_time();
fb = esp_camera_fb_get();
if (!fb) {
Serial.printf("Camera capture failed");
httpd_resp_send_500(req);
return ESP_FAIL;
}
httpd_resp_set_type(req, "image/jpeg");
httpd_resp_set_hdr(req, "Content-Disposition", "inline; filename=capture.jpg");
size_t fb_len = 0;
if(fb->format == PIXFORMAT_JPEG){
fb_len = fb->len;
res = httpd_resp_send(req, (const char *)fb->buf, fb->len);
} else {
jpg_chunking_t jchunk = {req, 0};
res = frame2jpg_cb(fb, 80, jpg_encode_stream, &jchunk)?ESP_OK:ESP_FAIL;
httpd_resp_send_chunk(req, NULL, 0);
fb_len = jchunk.len;
}
esp_camera_fb_return(fb);
int64_t fr_end = esp_timer_get_time();
Serial.printf("JPG: %uB %ums", (uint32_t)(fb_len), (uint32_t)((fr_end - fr_start)/1000));
return res;
}
static esp_err_t stream_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
size_t _jpg_buf_len = 0;
uint8_t * _jpg_buf = NULL;
char * part_buf[64];
static int64_t last_frame = 0;
if(!last_frame) {
last_frame = esp_timer_get_time();
}
res = httpd_resp_set_type(req, _STREAM_CONTENT_TYPE);
if(res != ESP_OK){
return res;
}
while(true){
fb = esp_camera_fb_get();
if (!fb) {
Serial.printf("Camera capture failed");
res = ESP_FAIL;
} else {
if(fb->format != PIXFORMAT_JPEG){
bool jpeg_converted = frame2jpg(fb, 80, &_jpg_buf, &_jpg_buf_len);
esp_camera_fb_return(fb);
fb = NULL;
if(!jpeg_converted){
Serial.printf("JPEG compression failed");
res = ESP_FAIL;
}
} else {
_jpg_buf_len = fb->len;
_jpg_buf = fb->buf;
}
}
if(res == ESP_OK){
size_t hlen = snprintf((char *)part_buf, 64, _STREAM_PART, _jpg_buf_len);
res = httpd_resp_send_chunk(req, (const char *)part_buf, hlen);
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, (const char *)_jpg_buf, _jpg_buf_len);
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, _STREAM_BOUNDARY, strlen(_STREAM_BOUNDARY));
}
if(fb){
esp_camera_fb_return(fb);
fb = NULL;
_jpg_buf = NULL;
} else if(_jpg_buf){
free(_jpg_buf);
_jpg_buf = NULL;
}
if(res != ESP_OK){
break;
}
int64_t fr_end = esp_timer_get_time();
int64_t frame_time = fr_end - last_frame;
last_frame = fr_end;
frame_time /= 1000;
uint32_t avg_frame_time = ra_filter_run(&ra_filter, frame_time);
Serial.printf("MJPG: %uB %ums (%.1ffps), AVG: %ums (%.1ffps)"
,(uint32_t)(_jpg_buf_len),
(uint32_t)frame_time, 1000.0 / (uint32_t)frame_time,
avg_frame_time, 1000.0 / avg_frame_time
);
}
last_frame = 0;
return res;
}
static esp_err_t cmd_handler(httpd_req_t *req){
char* buf;
size_t buf_len;
char variable[32] = {0,};
char value[32] = {0,};
buf_len = httpd_req_get_url_query_len(req) + 1;
if (buf_len > 1) {
buf = (char*)malloc(buf_len);
if(!buf){
httpd_resp_send_500(req);
return ESP_FAIL;
}
if (httpd_req_get_url_query_str(req, buf, buf_len) == ESP_OK) {
if (httpd_query_key_value(buf, "var", variable, sizeof(variable)) == ESP_OK &&
httpd_query_key_value(buf, "val", value, sizeof(value)) == ESP_OK) {
} else {
free(buf);
httpd_resp_send_404(req);
return ESP_FAIL;
}
} else {
free(buf);
httpd_resp_send_404(req);
return ESP_FAIL;
}
free(buf);
} else {
httpd_resp_send_404(req);
return ESP_FAIL;
}
int val = atoi(value);
sensor_t * s = esp_camera_sensor_get();
int res = 0;
if(!strcmp(variable, "framesize")) {
if(s->pixformat == PIXFORMAT_JPEG) res = s->set_framesize(s, (framesize_t)val);
}
else if(!strcmp(variable, "quality")) res = s->set_quality(s, val);
else if(!strcmp(variable, "contrast")) res = s->set_contrast(s, val);
else if(!strcmp(variable, "brightness")) res = s->set_brightness(s, val);
else if(!strcmp(variable, "saturation")) res = s->set_saturation(s, val);
else if(!strcmp(variable, "gainceiling")) res = s->set_gainceiling(s, (gainceiling_t)val);
else if(!strcmp(variable, "colorbar")) res = s->set_colorbar(s, val);
else if(!strcmp(variable, "awb")) res = s->set_whitebal(s, val);
else if(!strcmp(variable, "agc")) res = s->set_gain_ctrl(s, val);
else if(!strcmp(variable, "aec")) res = s->set_exposure_ctrl(s, val);
else if(!strcmp(variable, "hmirror")) res = s->set_hmirror(s, val);
else if(!strcmp(variable, "vflip")) res = s->set_vflip(s, val);
else if(!strcmp(variable, "awb_gain")) res = s->set_awb_gain(s, val);
else if(!strcmp(variable, "agc_gain")) res = s->set_agc_gain(s, val);
else if(!strcmp(variable, "aec_value")) res = s->set_aec_value(s, val);
else if(!strcmp(variable, "aec2")) res = s->set_aec2(s, val);
else if(!strcmp(variable, "dcw")) res = s->set_dcw(s, val);
else if(!strcmp(variable, "bpc")) res = s->set_bpc(s, val);
else if(!strcmp(variable, "wpc")) res = s->set_wpc(s, val);
else if(!strcmp(variable, "raw_gma")) res = s->set_raw_gma(s, val);
else if(!strcmp(variable, "lenc")) res = s->set_lenc(s, val);
else if(!strcmp(variable, "special_effect")) res = s->set_special_effect(s, val);
else if(!strcmp(variable, "wb_mode")) res = s->set_wb_mode(s, val);
else if(!strcmp(variable, "ae_level")) res = s->set_ae_level(s, val);
else {
res = -1;
}
if(res){
return httpd_resp_send_500(req);
}
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, NULL, 0);
}
static esp_err_t status_handler(httpd_req_t *req){
static char json_response[1024];
sensor_t * s = esp_camera_sensor_get();
char * p = json_response;
*p++ = '{';
p+=sprintf(p, "\"framesize\":%u,", s->status.framesize);
p+=sprintf(p, "\"quality\":%u,", s->status.quality);
p+=sprintf(p, "\"brightness\":%d,", s->status.brightness);
p+=sprintf(p, "\"contrast\":%d,", s->status.contrast);
p+=sprintf(p, "\"saturation\":%d,", s->status.saturation);
p+=sprintf(p, "\"special_effect\":%u,", s->status.special_effect);
p+=sprintf(p, "\"wb_mode\":%u,", s->status.wb_mode);
p+=sprintf(p, "\"awb\":%u,", s->status.awb);
p+=sprintf(p, "\"awb_gain\":%u,", s->status.awb_gain);
p+=sprintf(p, "\"aec\":%u,", s->status.aec);
p+=sprintf(p, "\"aec2\":%u,", s->status.aec2);
p+=sprintf(p, "\"ae_level\":%d,", s->status.ae_level);
p+=sprintf(p, "\"aec_value\":%u,", s->status.aec_value);
p+=sprintf(p, "\"agc\":%u,", s->status.agc);
p+=sprintf(p, "\"agc_gain\":%u,", s->status.agc_gain);
p+=sprintf(p, "\"gainceiling\":%u,", s->status.gainceiling);
p+=sprintf(p, "\"bpc\":%u,", s->status.bpc);
p+=sprintf(p, "\"wpc\":%u,", s->status.wpc);
p+=sprintf(p, "\"raw_gma\":%u,", s->status.raw_gma);
p+=sprintf(p, "\"lenc\":%u,", s->status.lenc);
p+=sprintf(p, "\"hmirror\":%u,", s->status.hmirror);
p+=sprintf(p, "\"dcw\":%u,", s->status.dcw);
p+=sprintf(p, "\"colorbar\":%u", s->status.colorbar);
*p++ = '}';
*p++ = 0;
httpd_resp_set_type(req, "application/json");
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, json_response, strlen(json_response));
}
static esp_err_t index_handler(httpd_req_t *req){
httpd_resp_set_type(req, "text/html");
String page = "";
page += "<meta name=\"viewport\" content=\"width=device-width, initial-scale=1.0, maximum-scale=1.0, user-scalable=0\">\n";
page += "<script>var xhttp = new XMLHttpRequest();</script>";
page += "<script>function getsend(arg) { xhttp.open('GET', arg +'?' + new Date().getTime(), true); xhttp.send() } </script>";
//page += "<p align=center><IMG SRC='http://" + WiFiAddr + ":81/stream' style='width:280px;'></p><br/><br/>";
page += "<p align=center><IMG SRC='http://" + WiFiAddr + ":81/stream' style='width:300px; transform:rotate(180deg);'></p><br/><br/>";
page += "<p align=center> <button style=background-color:lightgrey;width:90px;height:80px; onmousedown=getsend('left') onmouseup=getsend('stop') ontouchstart=getsend('left') ontouchend=getsend('stop')><b>Forward</b></button></p>";
page += "<p align=center>";
page += "<button style=background-color:lightgrey;width:90px;height:80px onmousedown=getsend('go') onmouseup=getsend('stop') ontouchstart=getsend('go') ontouchend=getsend('stop') ><b>Left</b></button> ";
page += "<button style=background-color:indianred;width:90px;height:80px onmousedown=getsend('stop') onmouseup=getsend('stop')><b>Stop</b></button> ";
page += "<button style=background-color:lightgrey;width:90px;height:80px onmousedown=getsend('back') onmouseup=getsend('stop') ontouchstart=getsend('back') ontouchend=getsend('stop') ><b>Right</b></button>";
page += "</p>";
page += "<p align=center><button style=background-color:lightgrey;width:90px;height:80px onmousedown=getsend('right') onmouseup=getsend('stop') ontouchstart=getsend('right') ontouchend=getsend('stop')><b>Backward</b></button></p>";
page += "<p align=center>";
page += "<button style=background-color:yellow;width:140px;height:40px onmousedown=getsend('ledon')><b>Light ON</b></button>";
page += "<button style=background-color:yellow;width:140px;height:40px onmousedown=getsend('ledoff')><b>Light OFF</b></button>";
page += "</p>";
return httpd_resp_send(req, &page[0], strlen(&page[0]));
}
static esp_err_t go_handler(httpd_req_t *req){
WheelAct(HIGH, LOW, HIGH, LOW);
Serial.println("Go");
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
static esp_err_t back_handler(httpd_req_t *req){
WheelAct(LOW, HIGH, LOW, HIGH);
Serial.println("Back");
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
static esp_err_t left_handler(httpd_req_t *req){
WheelAct(HIGH, LOW, LOW, HIGH);
Serial.println("Left");
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
static esp_err_t right_handler(httpd_req_t *req){
WheelAct(LOW, HIGH, HIGH, LOW);
Serial.println("Right");
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
static esp_err_t stop_handler(httpd_req_t *req){
WheelAct(LOW, LOW, LOW, LOW);
Serial.println("Stop");
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
static esp_err_t ledon_handler(httpd_req_t *req){
digitalWrite(gpLed, HIGH);
Serial.println("LED ON");
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
static esp_err_t ledoff_handler(httpd_req_t *req){
digitalWrite(gpLed, LOW);
Serial.println("LED OFF");
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
void startCameraServer(){
httpd_config_t config = HTTPD_DEFAULT_CONFIG();
httpd_uri_t go_uri = {
.uri = "/go",
.method = HTTP_GET,
.handler = go_handler,
.user_ctx = NULL
};
httpd_uri_t back_uri = {
.uri = "/back",
.method = HTTP_GET,
.handler = back_handler,
.user_ctx = NULL
};
httpd_uri_t stop_uri = {
.uri = "/stop",
.method = HTTP_GET,
.handler = stop_handler,
.user_ctx = NULL
};
httpd_uri_t left_uri = {
.uri = "/left",
.method = HTTP_GET,
.handler = left_handler,
.user_ctx = NULL
};
httpd_uri_t right_uri = {
.uri = "/right",
.method = HTTP_GET,
.handler = right_handler,
.user_ctx = NULL
};
httpd_uri_t ledon_uri = {
.uri = "/ledon",
.method = HTTP_GET,
.handler = ledon_handler,
.user_ctx = NULL
};
httpd_uri_t ledoff_uri = {
.uri = "/ledoff",
.method = HTTP_GET,
.handler = ledoff_handler,
.user_ctx = NULL
};
httpd_uri_t index_uri = {
.uri = "/",
.method = HTTP_GET,
.handler = index_handler,
.user_ctx = NULL
};
httpd_uri_t status_uri = {
.uri = "/status",
.method = HTTP_GET,
.handler = status_handler,
.user_ctx = NULL
};
httpd_uri_t cmd_uri = {
.uri = "/control",
.method = HTTP_GET,
.handler = cmd_handler,
.user_ctx = NULL
};
httpd_uri_t capture_uri = {
.uri = "/capture",
.method = HTTP_GET,
.handler = capture_handler,
.user_ctx = NULL
};
httpd_uri_t stream_uri = {
.uri = "/stream",
.method = HTTP_GET,
.handler = stream_handler,
.user_ctx = NULL
};
ra_filter_init(&ra_filter, 20);
Serial.printf("Starting web server on port: '%d'", config.server_port);
if (httpd_start(&camera_httpd, &config) == ESP_OK) {
httpd_register_uri_handler(camera_httpd, &index_uri);
httpd_register_uri_handler(camera_httpd, &go_uri);
httpd_register_uri_handler(camera_httpd, &back_uri);
httpd_register_uri_handler(camera_httpd, &stop_uri);
httpd_register_uri_handler(camera_httpd, &left_uri);
httpd_register_uri_handler(camera_httpd, &right_uri);
httpd_register_uri_handler(camera_httpd, &ledon_uri);
httpd_register_uri_handler(camera_httpd, &ledoff_uri);
}
config.server_port += 1;
config.ctrl_port += 1;
Serial.printf("Starting stream server on port: '%d'", config.server_port);
if (httpd_start(&stream_httpd, &config) == ESP_OK) {
httpd_register_uri_handler(stream_httpd, &stream_uri);
}
}
void WheelAct(int nLf, int nLb, int nRf, int nRb)
{
digitalWrite(gpLf, nLf);
digitalWrite(gpLb, nLb);
digitalWrite(gpRf, nRf);
digitalWrite(gpRb, nRb);
}
TROUBLESHOOTING
No power supply?
Try changing your batteries. Ensure that you must supply 12v to the L298 Motor Driver module. A Voltage rating less than this will not work.
Project not working?
Ensure that the circuit you have made is according to the circuit diagram. Check for loose connections. Cross-check for motor connections.
Motors are rotating in opposite direction?
For this, reverse the terminals of the motor connecting the Motor driver module.
Error in uploading code?
If so, then try again uploading the code with pressing RESET button on module.
Not connecting to WiFi?
Try disconnecting and reconnecting to WiFi again. Make sure you have entered the right credentials for your wifi mentioned in the code. ESP32 CAM module creates its hotspot to which we have to connect our phone wifi. No other internet connection is required.
Link: https://quartzcomponents.com/blogs/electronics-projects/surveillance-robocar-using-esp32-cam-modul