In this Arduino Tutorial we will learn how to control DC motors using Arduino. We well take a look at some basic techniques for controlling DC motors and make two example through which we will learn how to control DC motors using the L298N motor driver and the Arduino board.
You can watch the following video or read the written tutorial below.
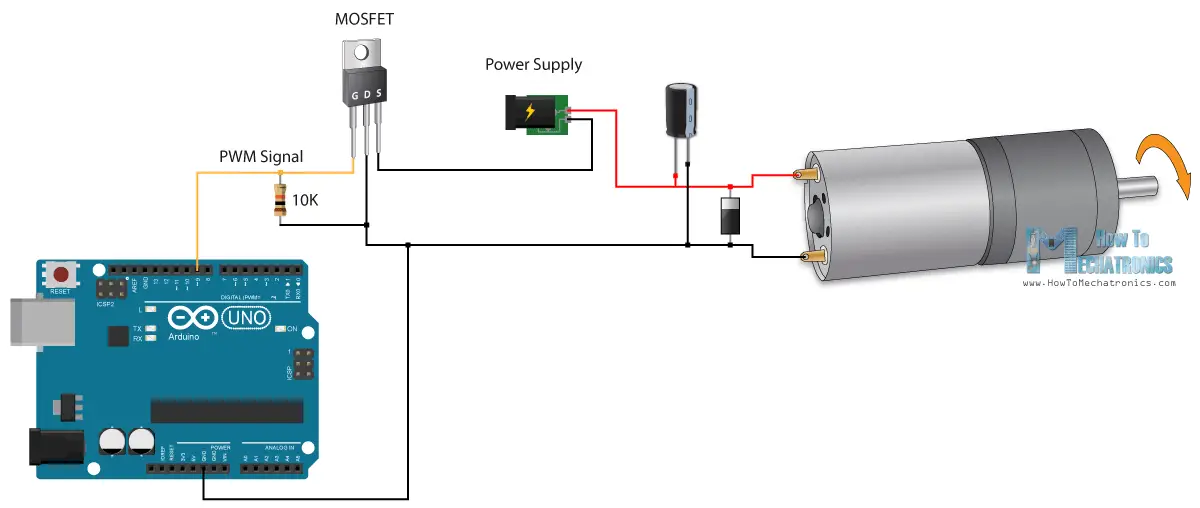
We can control the speed of the DC motor by simply controlling the input voltage to the motor and the most common method of doing that is by using PWM signal.

PWM DC Motor Control
PWM, or pulse width modulation is a technique which allows us to adjust the average value of the voltage that’s going to the electronic device by turning on and off the power at a fast rate. The average voltage depends on the duty cycle, or the amount of time the signal is ON versus the amount of time the signal is OFF in a single period of time.

So depending on the size of the motor, we can simply connect an Arduino PWM output to the base of transistor or the gate of a MOSFET and control the speed of the motor by controlling the PWM output. The low power Arduino PWM signal switches on and off the gate at the MOSFET through which the high power motor is driven.
H-Bridge DC Motor Control
On the other hand, for controlling the rotation direction, we just need to inverse the direction of the current flow through the motor, and the most common method of doing that is by using an H-Bridge. An H-Bridge circuit contains four switching elements, transistors or MOSFETs, with the motor at the center forming an H-like configuration. By activating two particular switches at the same time we can change the direction of the current flow, thus change the rotation direction of the motor.

So if we combine these two methods, the PWM and the H-Bridge, we can have a complete control over the DC motor. There are many DC motor drivers that have these features and the L298N is one of them.
L298N Driver
The L298N is a dual H-Bridge motor driver which allows speed and direction control of two DC motors at the same time. The module can drive DC motors that have voltages between 5 and 35V, with a peak current up to 2A.
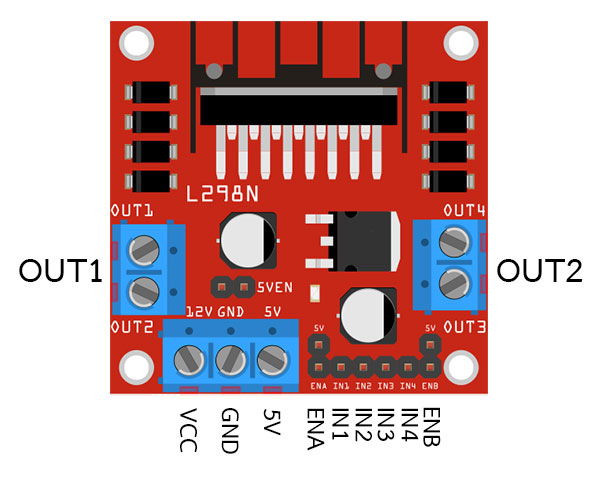
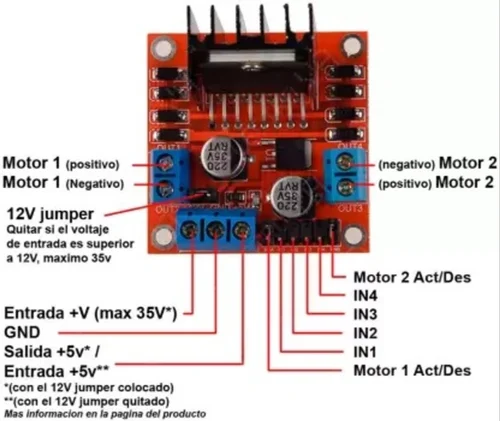
Let’s take a closer look at the pinout of L298N module and explain how it works. The module has two screw terminal blocks for the motor A and B, and another screw terminal block for the Ground pin, the VCC for motor and a 5V pin which can either be an input or output.

This depends on the voltage used at the motors VCC. The module have an onboard 5V regulator which is either enabled or disabled using a jumper. If the motor supply voltage is up to 12V we can enable the 5V regulator and the 5V pin can be used as output, for example for powering our Arduino board. But if the motor voltage is greater than 12V we must disconnect the jumper because those voltages will cause damage to the onboard 5V regulator. In this case the 5V pin will be used as input as we need connect it to a 5V power supply in order the IC to work properly.
We can note here that this IC makes a voltage drop of about 2V. So for example, if we use a 12V power supply, the voltage at motors terminals will be about 10V, which means that we won’t be able to get the maximum speed out of our 12V DC motor.

Next are the logic control inputs. The Enable A and Enable B pins are used for enabling and controlling the speed of the motor. If a jumper is present on this pin, the motor will be enabled and work at maximum speed, and if we remove the jumper we can connect a PWM input to this pin and in that way control the speed of the motor. If we connect this pin to a Ground the motor will be disabled.
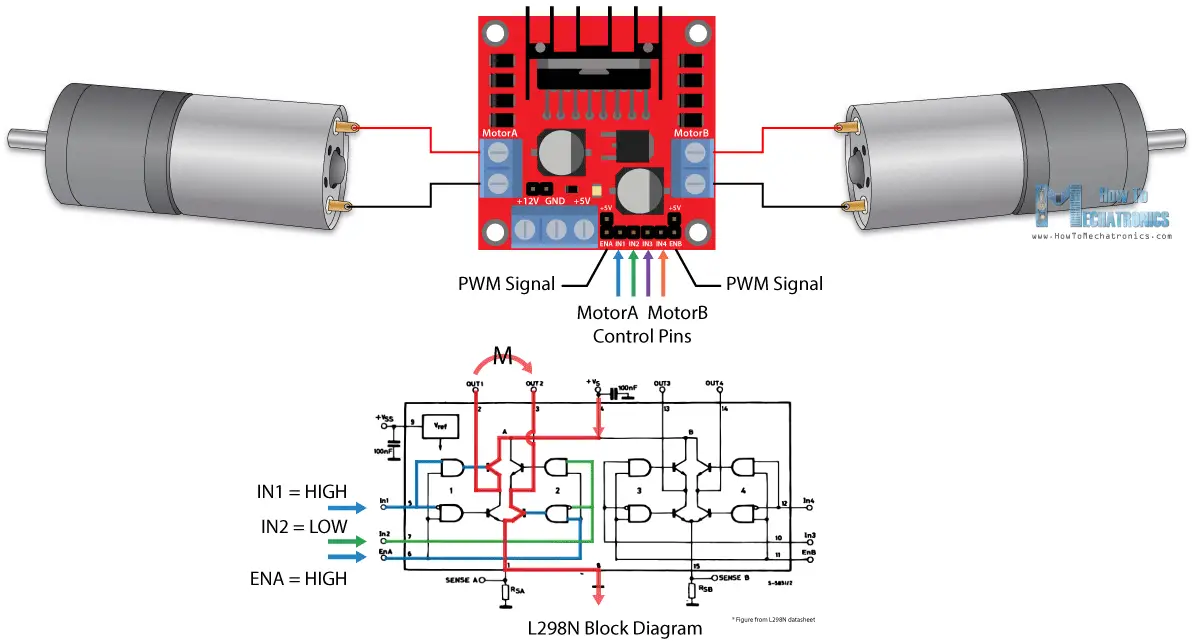
Next, the Input 1 and Input 2 pins are used for controlling the rotation direction of the motor A, and the inputs 3 and 4 for the motor B. Using these pins we actually control the switches of the H-Bridge inside the L298N IC. If input 1 is LOW and input 2 is HIGH the motor will move forward, and vice versa, if input 1 is HIGH and input 2 is LOW the motor will move backward. In case both inputs are same, either LOW or HIGH the motor will stop. The same applies for the inputs 3 and 4 and the motor B.
Arduino and L298N Motor Driver
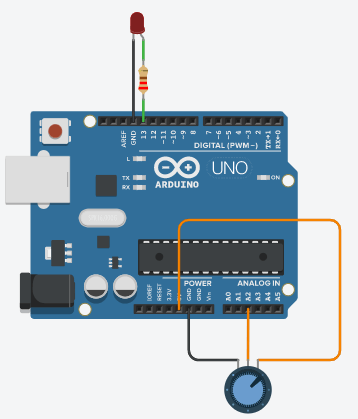
Now let’s make some practical applications. In the first example we will control the speed of the motor using a potentiometer and change the rotation direction using a push button. Here’s the circuit schematics.
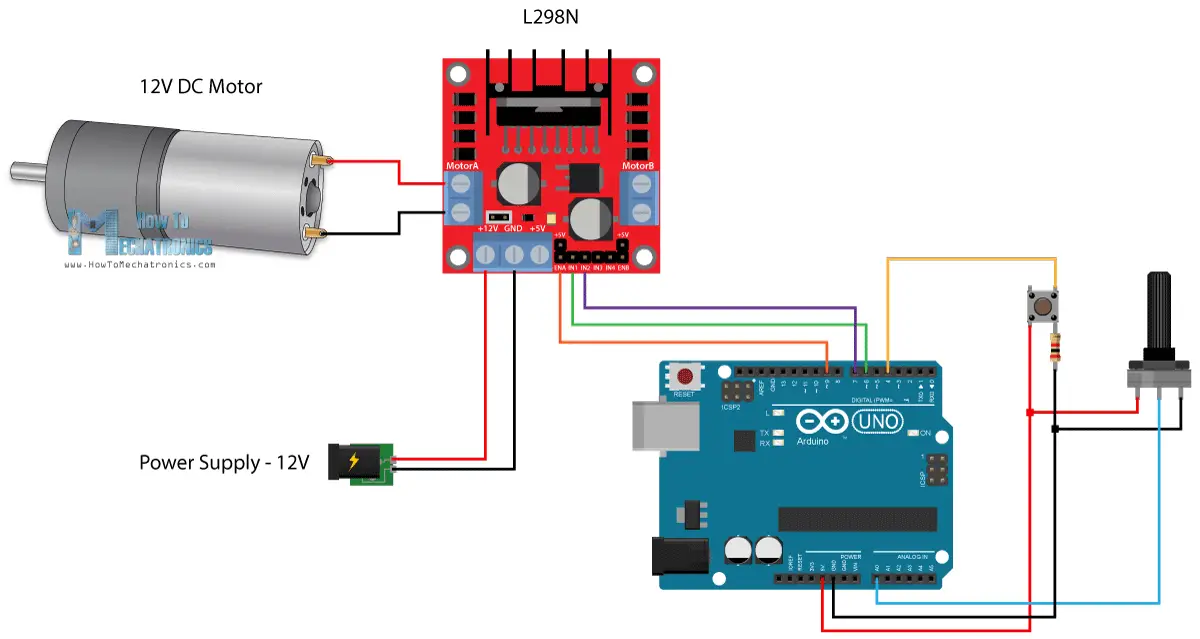
So we need an L298N motor driver, a DC motor, a potentiometer, a push button and an Arduino board.
You can get the components needed for this Arduino Tutorial from the links below:
- L298N Driver ……………………………….. Amazon / Banggood / Aliexpress
- 12V High Torque DC Motor ………….. Amazon / Banggood / Aliexpress
- DC Motor w/ Plastic Tire Wheel ……. Amazon / Banggood / Aliexpress
- Arduino Board ……………………………… Amazon / Banggood / Aliexpress
- Breadboard and Jump Wires ………… Amazon / Banggood / Aliexpress
Disclosure: These are affiliate links. As an Amazon Associate I earn from qualifying purchases.
Arduino Code
Here’s the Arduino code:
/* Arduino DC Motor Control - PWM | H-Bridge | L298N - Example 01
by Dejan Nedelkovski, www.HowToMechatronics.com
*/
#define enA 9
#define in1 6
#define in2 7
#define button 4
int rotDirection = 0;
int pressed = false;
void setup() {
pinMode(enA, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(button, INPUT);
// Set initial rotation direction
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
}
void loop() {
int potValue = analogRead(A0); // Read potentiometer value
int pwmOutput = map(potValue, 0, 1023, 0 , 255); // Map the potentiometer value from 0 to 255
analogWrite(enA, pwmOutput); // Send PWM signal to L298N Enable pin
// Read button - Debounce
if (digitalRead(button) == true) {
pressed = !pressed;
}
while (digitalRead(button) == true);
delay(20);
// If button is pressed - change rotation direction
if (pressed == true & rotDirection == 0) {
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
rotDirection = 1;
delay(20);
}
// If button is pressed - change rotation direction
if (pressed == false & rotDirection == 1) {
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
rotDirection = 0;
delay(20);
}
}Description: So first we need to define the pins and some variables needed for the program. In the setup section we need to set the pin modes and the initial rotation direction of the motor. In the loop section we start by reading the potentiometer value and then map the value that we get from it which is from 0 to 1023, to a value from 0 to 255 for the PWM signal, or that’s 0 to 100% duty cycle of the PWM signal. Then using the analogWrite() function we send the PWM signal to the Enable pin of the L298N board, which actually drives the motor.
Next, we check whether we have pressed the button, and if that’s true, we will change the rotation direction of the motor by setting the Input 1 and Input 2 states inversely. The push button will work as toggle button and each time we press it, it will change the rotation direction of the motor.
Arduino Robot Car Control using L298N Motor Driver
So once we have learned this, now we can build our own Arduino robot car. Here’s the circuit schematic:
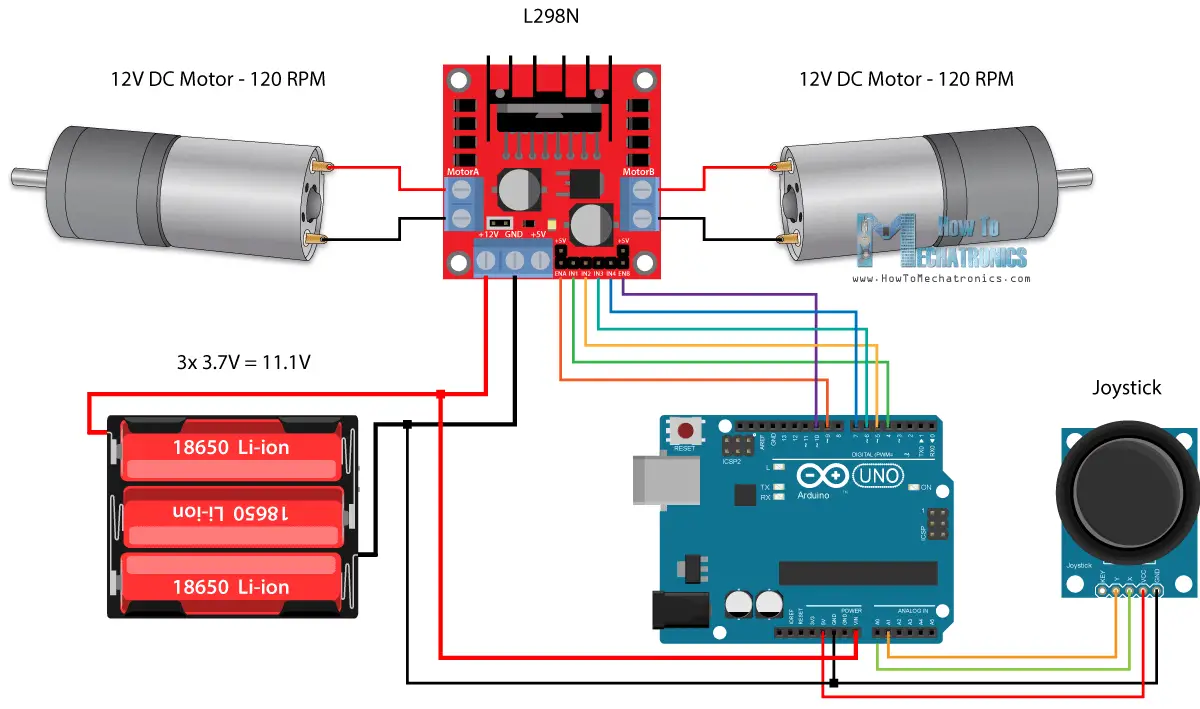
All we need is 2 DC Motors, the L298N motor driver, an Arduino board and a joystick for the control. As for the power supply, I chose to use three 3.7V Li-ion batteries, providing total of 11V. I made the chassis out of 3 mm tick plywood, attached the motors to it using metal brackets, attached wheels to the motors and in front attached a swivel wheel.

Now let’s take a look at the Arduino code and see how it works. (Down below you can find the complete code)
int xAxis = analogRead(A0); // Read Joysticks X-axis
int yAxis = analogRead(A1); // Read Joysticks Y-axisCode language: Arduino (arduino)After defining the pins, in the loop section, we start with reading the joystick X and Y axis values. The joystick is actually made of two potentiometers which are connected to the analog inputs of the Arduino and they have values from 0 to 1023. When the joystick stays in its center position the value of both potentiometers, or axes is around 512.

We will add a little tolerance and consider the values from 470 to 550 as center. So if we move the Y axis of joystick backward and the value goes below 470 we will set the two motors rotation direction to backward using the four input pins. Then, we will convert the declining values from 470 to 0 into increasing PWM values from 0 to 255 which is actually the speed of the motor.
// Y-axis used for forward and backward control
if (yAxis < 470) {
// Set Motor A backward
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// Set Motor B backward
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// Convert the declining Y-axis readings for going backward from 470 to 0 into 0 to 255 value for the PWM signal for increasing the motor speed
motorSpeedA = map(yAxis, 470, 0, 0, 255);
motorSpeedB = map(yAxis, 470, 0, 0, 255);
}Similar, if we move the Y axis of the joystick forward and the value goes above 550 we will set the motors to move forward and convert the readings from 550 to 1023 into PWM values from 0 to 255. If the joystick stays in its center the motors speed will be zero.
Next, let’s see how we use the X axis for the left and right control of the car.
// X-axis used for left and right control
if (xAxis < 470) {
// Convert the declining X-axis readings from 470 to 0 into increasing 0 to 255 value
int xMapped = map(xAxis, 470, 0, 0, 255);
// Move to left - decrease left motor speed, increase right motor speed
motorSpeedA = motorSpeedA - xMapped;
motorSpeedB = motorSpeedB + xMapped;
// Confine the range from 0 to 255
if (motorSpeedA < 0) {
motorSpeedA = 0;
}
if (motorSpeedB > 255) {
motorSpeedB = 255;
}
}So again, first we need to convert the X axis readings into speed values from 0 to 255. For moving left, we use this value to decrease the left motor speed and increase the right motor speed. Here, because of the arithmetic functions we use two additional “if” statements to confine the range of the motor speed from 0 to 255.

The same method is used for moving the car to the right.
Related: How To Make a PWM DC Motor Speed Controller using the 555 Timer IC
Depending on the applied voltage and the motor itself, at lower speeds the motor is not able to start moving and it produces a buzzing sound. In my case, the motors were not able to move if the value of the PWM signal was below 70. Therefore using this two if statements I actually confined to speed range from 70 to 255. At the end we just send the final motor speeds or PWM signal to the enable pins of the L298N driver.
// Prevent buzzing at low speeds (Adjust according to your motors. My motors couldn't start moving if PWM value was below value of 70)
if (motorSpeedA < 70) {
motorSpeedA = 0;
}
if (motorSpeedB < 70) {
motorSpeedB = 0;
}
analogWrite(enA, motorSpeedA); // Send PWM signal to motor A
analogWrite(enB, motorSpeedB); // Send PWM signal to motor BHere’s the complete code of the Arduino robot car example:
/* Arduino DC Motor Control - PWM | H-Bridge | L298N
Example 02 - Arduino Robot Car Control
by Dejan Nedelkovski, www.HowToMechatronics.com
*/
#define enA 9
#define in1 4
#define in2 5
#define enB 10
#define in3 6
#define in4 7
int motorSpeedA = 0;
int motorSpeedB = 0;
void setup() {
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
void loop() {
int xAxis = analogRead(A0); // Read Joysticks X-axis
int yAxis = analogRead(A1); // Read Joysticks Y-axis
// Y-axis used for forward and backward control
if (yAxis < 470) {
// Set Motor A backward
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// Set Motor B backward
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// Convert the declining Y-axis readings for going backward from 470 to 0 into 0 to 255 value for the PWM signal for increasing the motor speed
motorSpeedA = map(yAxis, 470, 0, 0, 255);
motorSpeedB = map(yAxis, 470, 0, 0, 255);
}
else if (yAxis > 550) {
// Set Motor A forward
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
// Set Motor B forward
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// Convert the increasing Y-axis readings for going forward from 550 to 1023 into 0 to 255 value for the PWM signal for increasing the motor speed
motorSpeedA = map(yAxis, 550, 1023, 0, 255);
motorSpeedB = map(yAxis, 550, 1023, 0, 255);
}
// If joystick stays in middle the motors are not moving
else {
motorSpeedA = 0;
motorSpeedB = 0;
}
// X-axis used for left and right control
if (xAxis < 470) {
// Convert the declining X-axis readings from 470 to 0 into increasing 0 to 255 value
int xMapped = map(xAxis, 470, 0, 0, 255);
// Move to left - decrease left motor speed, increase right motor speed
motorSpeedA = motorSpeedA - xMapped;
motorSpeedB = motorSpeedB + xMapped;
// Confine the range from 0 to 255
if (motorSpeedA < 0) {
motorSpeedA = 0;
}
if (motorSpeedB > 255) {
motorSpeedB = 255;
}
}
if (xAxis > 550) {
// Convert the increasing X-axis readings from 550 to 1023 into 0 to 255 value
int xMapped = map(xAxis, 550, 1023, 0, 255);
// Move right - decrease right motor speed, increase left motor speed
motorSpeedA = motorSpeedA + xMapped;
motorSpeedB = motorSpeedB - xMapped;
// Confine the range from 0 to 255
if (motorSpeedA > 255) {
motorSpeedA = 255;
}
if (motorSpeedB < 0) {
motorSpeedB = 0;
}
}
// Prevent buzzing at low speeds (Adjust according to your motors. My motors couldn't start moving if PWM value was below value of 70)
if (motorSpeedA < 70) {
motorSpeedA = 0;
}
if (motorSpeedB < 70) {
motorSpeedB = 0;
}
analogWrite(enA, motorSpeedA); // Send PWM signal to motor A
analogWrite(enB, motorSpeedB); // Send PWM signal to motor B
}So that would be all for this tutorial, and in my next video we will upgrade this Arduino robot car, by adding a Bluetooth and Radio devices for enabling smartphone and wireless control.
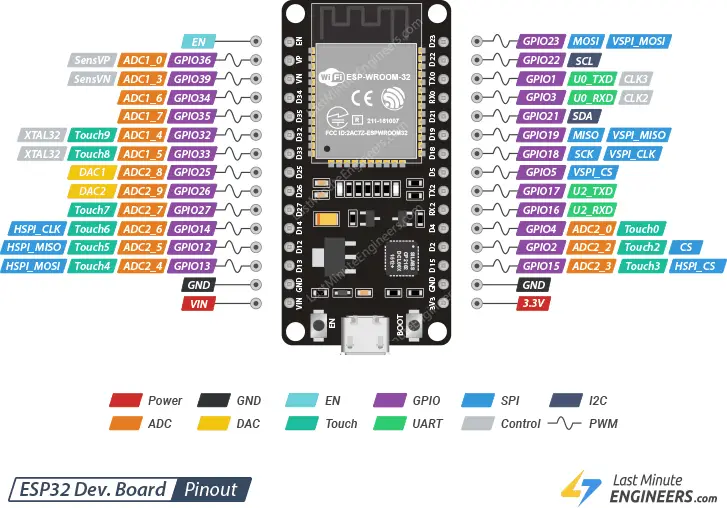
For arduino ESP32 with L298n
การใช้ ESP32 เพื่อควบคุมมอเตอร์ 4 ล้อผ่าน L298N โดยใช้การควบคุมความเร็วที่แตกต่างกันในแต่ละล้อ สามารถทำได้โดยการใช้สัญญาณ PWM จาก ESP32 เพื่อควบคุมความเร็วของมอเตอร์แต่ละตัว รวมถึงการควบคุมทิศทางการหมุนของมอเตอร์ด้วยการใช้ IN1, IN2, IN3, และ IN4 บนโมดูล L298N ซึ่งเชื่อมต่อกับมอเตอร์ 4 ตัว
พินที่ใช้:
- IN1, IN2: ควบคุมทิศทางของมอเตอร์ที่ 1 (ล้อหน้า)
- IN3, IN4: ควบคุมทิศทางของมอเตอร์ที่ 2 (ล้อหลัง)
- ENA, ENB: ใช้ PWM เพื่อควบคุมความเร็วของมอเตอร์ที่ 1 และ 2
การควบคุมการเคลื่อนที่:
- การควบคุมทิศทาง: โดยการตั้งค่า IN1, IN2, IN3, IN4 เพื่อให้มอเตอร์หมุนในทิศทางที่ต้องการ
- การควบคุมความเร็ว: โดยการใช้สัญญาณ PWM เพื่อควบคุมความเร็วของมอเตอร์
ตัวอย่าง Code ที่ใช้ควบคุมรถ 4 ล้อ
//v1
// กำหนดพินที่ใช้
const int IN1 = 32; // IN1 ของ L298N (มอเตอร์ล้อหน้า)
const int IN2 = 33; // IN2 ของ L298N (มอเตอร์ล้อหน้า)
const int IN3 = 25; // IN3 ของ L298N (มอเตอร์ล้อหลัง)
const int IN4 = 26; // IN4 ของ L298N (มอเตอร์ล้อหลัง)
const int ENA = 14; // ENA ของ L298N (PWM สำหรับมอเตอร์ล้อหน้า)
const int ENB = 12; // ENB ของ L298N (PWM สำหรับมอเตอร์ล้อหลัง)
// กำหนดความเร็ว (ใช้ PWM)
int speed1 = 128; // ความเร็วของมอเตอร์ล้อหน้า (50% ความเร็วสูงสุด)
int speed2 = 255; // ความเร็วของมอเตอร์ล้อหลัง (100% ความเร็วสูงสุด)
void setup() {
// กำหนดพินที่ใช้เป็น OUTPUT
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
// ตั้งค่าเริ่มต้นให้มอเตอร์หมุนไปข้างหน้า
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
// ใช้ PWM ควบคุมความเร็ว
analogWrite(ENA, speed1); // มอเตอร์ล้อหน้า
analogWrite(ENB, speed2); // มอเตอร์ล้อหลัง
}
void loop() {
// รถวิ่งไปข้างหน้า (ทิศทางเดียวกันทั้ง 4 ล้อ)
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(ENA, 255); // ใช้ความเร็วสูงสุดสำหรับมอเตอร์ล้อหน้า
analogWrite(ENB, 255); // ใช้ความเร็วสูงสุดสำหรับมอเตอร์ล้อหลัง
delay(5000); // วิ่งไปข้างหน้า 5 วินาที
// เปลี่ยนทิศทางให้รถถอยหลัง (ทั้ง 4 ล้อหมุนกลับ)
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(ENA, 128); // ความเร็วลดลงเหลือ 50% สำหรับมอเตอร์ล้อหน้า
analogWrite(ENB, 128); // ความเร็วลดลงเหลือ 50% สำหรับมอเตอร์ล้อหลัง
delay(5000); // ถอยหลัง 5 วินาที
// เลี้ยวขวา (มอเตอร์ล้อหน้าไปข้างหน้า, มอเตอร์ล้อหลังถอยหลัง)
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(ENA, 255); // ใช้ความเร็วสูงสุดสำหรับมอเตอร์ล้อหน้า
analogWrite(ENB, 128); // ความเร็วลดลงเหลือ 50% สำหรับมอเตอร์ล้อหลัง
delay(5000); // เลี้ยวขวา 5 วินาที
// เลี้ยวซ้าย (มอเตอร์ล้อหน้าไปข้างหน้า, มอเตอร์ล้อหลังถอยหลัง)
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(ENA, 128); // ความเร็วลดลงเหลือ 50% สำหรับมอเตอร์ล้อหน้า
analogWrite(ENB, 255); // ใช้ความเร็วสูงสุดสำหรับมอเตอร์ล้อหลัง
delay(5000); // เลี้ยวซ้าย 5 วินาที
}Version2
//V2
// กำหนดพินที่ใช้
const int IN1 = 32;
const int IN2 = 33;
const int IN3 = 25;
const int IN4 = 26;
const int ENA = 14;
const int ENB = 12;
// กำหนดความเร็ว (ใช้ PWM)
int speed1 = 128; // ความเร็วของมอเตอร์ล้อหน้า (50% ความเร็วสูงสุด)
int speed2 = 255; // ความเร็วของมอเตอร์ล้อหลัง (100% ความเร็วสูงสุด)
void setup() {
// กำหนดพินที่ใช้เป็น OUTPUT
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
// ตั้งค่าเริ่มต้นให้มอเตอร์หยุด
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}
void loop() {
// รถวิ่งไปข้างหน้า
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(ENA, 255);
analogWrite(ENB, 255);
delay(5000); // วิ่งไปข้างหน้า 5 วินาที
// ถอยหลัง
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(ENA, 128);
analogWrite(ENB, 128);
delay(5000); // ถอยหลัง 5 วินาที
// เลี้ยวขวา
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(ENA, 255);
analogWrite(ENB, 128);
delay(5000); // เลี้ยวขวา 5 วินาที
// เลี้ยวซ้าย
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(ENA, 128);
analogWrite(ENB, 255);
delay(5000); // เลี้ยวซ้าย 5 วินาที
// หยุดมอเตอร์หลังจากทำงานเสร็จ
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
// หยุดการทำงานของโปรแกรม
exit(0);
}
อธิบาย Code:
- พินที่ใช้:
- IN1, IN2: ควบคุมทิศทางการหมุนของมอเตอร์ล้อหน้า
- IN3, IN4: ควบคุมทิศทางการหมุนของมอเตอร์ล้อหลัง
- ENA, ENB: ใช้ PWM ในการควบคุมความเร็วของมอเตอร์ล้อหน้าและล้อหลัง
- การตั้งค่าความเร็ว:
- ค่าความเร็วของมอเตอร์ถูกควบคุมโดยการใช้ analogWrite() ซึ่งสามารถตั้งค่าได้ตั้งแต่ 0 ถึง 255 (0 = หยุด, 255 = ความเร็วสูงสุด)
- ตัวอย่างเช่น
analogWrite(ENA, 128)จะทำให้มอเตอร์ล้อหน้าเดินด้วยความเร็ว 50% ของความเร็วสูงสุด
- การควบคุมทิศทาง:
- การตั้งค่า IN1 และ IN2 ควบคุมทิศทางของมอเตอร์ล้อหน้า:
- IN1 = HIGH และ IN2 = LOW หมุนไปข้างหน้า
- IN1 = LOW และ IN2 = HIGH หมุนถอยหลัง
- การตั้งค่า IN3 และ IN4 ควบคุมทิศทางของมอเตอร์ล้อหลัง:
- IN3 = HIGH และ IN4 = LOW หมุนไปข้างหน้า
- IN3 = LOW และ IN4 = HIGH หมุนถอยหลัง
- การตั้งค่า IN1 และ IN2 ควบคุมทิศทางของมอเตอร์ล้อหน้า:
- การควบคุมการเคลื่อนที่:
- เมื่อใช้
digitalWrite(IN1, HIGH)และdigitalWrite(IN2, LOW), รถจะหมุนไปข้างหน้า - เมื่อใช้
digitalWrite(IN3, HIGH)และdigitalWrite(IN4, LOW), รถจะหมุนไปข้างหน้า - สำหรับการเลี้ยวซ้ายหรือขวา สามารถปรับทิศทางของมอเตอร์ทั้ง 4 ตัวได้
- เมื่อใช้
คำแนะนำ:
- คุณสามารถปรับค่า speed1 และ speed2 เพื่อให้มอเตอร์ทั้ง 2 ตัวหมุนด้วยความเร็วที่ต่างกัน ซึ่งสามารถใช้ในการควบคุมการเลี้ยวหรือทิศทางการเคลื่อนที่
- ในกรณีที่ต้องการความเร็วที่ไม่เท่ากันระหว่างล้อหน้าและล้อหลัง คุณสามารถตั้งค่า ENA และ ENB ด้วยค่า PWM ที่แตกต่างกัน
- สามารถปรับเปลี่ยน delay() เพื่อให้รถวิ่งไปข้างหน้า, ถอยหลัง, หรือเลี้ยวในระยะเวลาที่ต้องการ
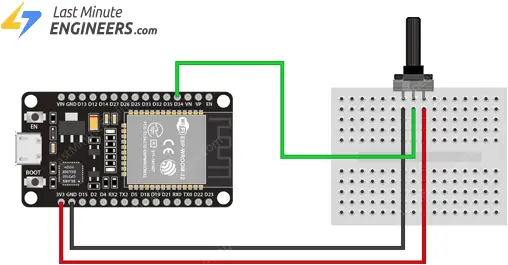
With Analog Potentiometer
// กำหนดพินที่ใช้
const int IN1 = 32; // IN1 ของ L298N (มอเตอร์ล้อหน้า)
const int IN2 = 33; // IN2 ของ L298N (มอเตอร์ล้อหน้า)
const int IN3 = 25; // IN3 ของ L298N (มอเตอร์ล้อหลัง)
const int IN4 = 26; // IN4 ของ L298N (มอเตอร์ล้อหลัง)
const int ENA = 14; // ENA ของ L298N (PWM สำหรับมอเตอร์ล้อหน้า)
const int ENB = 12; // ENB ของ L298N (PWM สำหรับมอเตอร์ล้อหลัง)
const int POT_PIN = 34; // พินสำหรับเชื่อมต่อ Potentiometer (สามารถใช้พินอะนาล็อกที่รองรับ)
// ตัวแปรเก็บค่าความเร็วของมอเตอร์
int motorSpeed = 0;
void setup() {
// กำหนดพินที่ใช้เป็น OUTPUT
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
// ตั้งค่าเริ่มต้นให้มอเตอร์หมุนไปข้างหน้า
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
// เริ่มต้นการสื่อสารกับ Serial Monitor
Serial.begin(115200);
}
void loop() {
// อ่านค่าจาก potentiometer
int potValue = analogRead(POT_PIN); // อ่านค่าจาก POT (0-4095)
// แสดงค่า potentiometer ใน Serial Monitor
Serial.print("Potentiometer Value: ");
Serial.println(potValue);
// ปรับค่าความเร็วของมอเตอร์ (แปลงค่าจาก 0-4095 เป็น 0-255)
motorSpeed = map(potValue, 0, 4095, 0, 255);
// ควบคุมความเร็วของมอเตอร์โดยใช้ PWM
analogWrite(ENA, motorSpeed); // ปรับความเร็วมอเตอร์ล้อหน้า
analogWrite(ENB, motorSpeed); // ปรับความเร็วมอเตอร์ล้อหลัง
delay(100); // รอเวลา 100ms
}
อธิบาย Code:
- พินที่ใช้:
- IN1, IN2, IN3, IN4: ใช้ควบคุมทิศทางการหมุนของมอเตอร์ 2 ตัว
- IN1, IN2 ควบคุมมอเตอร์ล้อหน้า
- IN3, IN4 ควบคุมมอเตอร์ล้อหลัง
- ENA, ENB: ใช้ PWM ในการควบคุมความเร็วของมอเตอร์ล้อหน้าและล้อหลัง
- POT_PIN (GPIO 34): ใช้เชื่อมต่อกับ POTENTIOMETER เพื่ออ่านค่าแอนะล็อกและใช้ในการควบคุมความเร็วของมอเตอร์
- IN1, IN2, IN3, IN4: ใช้ควบคุมทิศทางการหมุนของมอเตอร์ 2 ตัว
- การอ่านค่า Potentiometer:
- ใช้คำสั่ง
analogRead(POT_PIN)เพื่ออ่านค่าจากพิน POT_PIN (ค่า 0 ถึง 4095 สำหรับ ESP32) - ค่าที่ได้จาก analogRead() จะถูกแปลงจาก 0-4095 เป็น 0-255 ด้วยฟังก์ชัน
map()เพื่อให้สามารถใช้กับ PWM ได้
- ใช้คำสั่ง
- การควบคุมความเร็วของมอเตอร์:
- ค่าที่ได้จาก POTENTIOMETER จะถูกใช้ในฟังก์ชัน
analogWrite()เพื่อตั้งค่า PWM ของ ENA และ ENB - motorSpeed จะถูกตั้งค่าในช่วง 0 ถึง 255 ซึ่งจะปรับความเร็วของมอเตอร์ตามค่าของ POTENTIOMETER
- ค่าที่ได้จาก POTENTIOMETER จะถูกใช้ในฟังก์ชัน
- การแสดงค่าใน Serial Monitor:
- ค่าที่อ่านจาก POTENTIOMETER จะถูกแสดงใน Serial Monitor เพื่อให้สามารถดูค่าของมันได้
สำหรรับการต่อระบบ 4WD ร่วมกับ ESP32 โดยควบคุมผ่าน PS2 XY Joystick Module และใช้ L298N สำหรับควบคุมมอเตอร์ 4 ล้อ สามารถควบคุมทิศทาง (เดินหน้า, ถอยหลัง, เลี้ยวซ้าย, เลี้ยวขวา) และปรับความเร็วได้
// กำหนดพินสำหรับ Joystick
const int VRx = 34; // แกน X
const int VRy = 35; // แกน Y
const int SW = 32; // ปุ่มกด (ไม่ใช้ในโค้ดนี้ แต่สามารถเพิ่มฟังก์ชันได้)
// กำหนดพินสำหรับ L298N
const int ENA = 13; // PWM สำหรับมอเตอร์ซ้าย
const int IN1 = 14; // ทิศทางมอเตอร์ซ้าย (ไปข้างหน้า)
const int IN2 = 27; // ทิศทางมอเตอร์ซ้าย (ถอยหลัง)
const int ENB = 12; // PWM สำหรับมอเตอร์ขวา
const int IN3 = 26; // ทิศทางมอเตอร์ขวา (ไปข้างหน้า)
const int IN4 = 25; // ทิศทางมอเตอร์ขวา (ถอยหลัง)
void setup() {
// กำหนดพินของ Joystick
pinMode(SW, INPUT_PULLUP);
// กำหนดพินของ L298N
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
// เริ่มต้น Serial Monitor
Serial.begin(115200);
}
void loop() {
// อ่านค่าจาก Joystick
int xValue = analogRead(VRx); // ค่าแกน X (0 - 4095)
int yValue = analogRead(VRy); // ค่าแกน Y (0 - 4095)
// แปลงค่าจาก Joystick เป็นช่วง (-255 ถึง 255)
int speedX = map(xValue, 0, 4095, -255, 255);
int speedY = map(yValue, 0, 4095, -255, 255);
// คำนวณความเร็วล้อซ้ายและขวา
int leftSpeed = speedY + speedX; // ล้อซ้าย
int rightSpeed = speedY - speedX; // ล้อขวา
// จำกัดความเร็วให้อยู่ในช่วง -255 ถึง 255
leftSpeed = constrain(leftSpeed, -255, 255);
rightSpeed = constrain(rightSpeed, -255, 255);
// ควบคุมมอเตอร์ซ้าย
if (leftSpeed > 0) {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(ENA, leftSpeed);
} else if (leftSpeed < 0) {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
analogWrite(ENA, -leftSpeed);
} else {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
analogWrite(ENA, 0);
}
// ควบคุมมอเตอร์ขวา
if (rightSpeed > 0) {
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(ENB, rightSpeed);
} else if (rightSpeed < 0) {
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(ENB, -rightSpeed);
} else {
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
analogWrite(ENB, 0);
}
// Debug ค่าที่อ่านได้ใน Serial Monitor
Serial.print("X: ");
Serial.print(xValue);
Serial.print(" Y: ");
Serial.print(yValue);
Serial.print(" Left Speed: ");
Serial.print(leftSpeed);
Serial.print(" Right Speed: ");
Serial.println(rightSpeed);
delay(50); // ลดความถี่ของการอ่านค่า
}
คำอธิบาย Source Code
- การตั้งค่าพินของ Joystick:
- ใช้พิน VRx และ VRy (34 และ 35) เพื่ออ่านค่า Analog ของแกน X และ Y.
- ใช้คำสั่ง
analogRead()เพื่ออ่านค่า (ช่วง 0-4095 สำหรับ ESP32).
- การตั้งค่าพินของ L298N:
- IN1/IN2 ควบคุมทิศทางของมอเตอร์ซ้าย.
- IN3/IN4 ควบคุมทิศทางของมอเตอร์ขวา.
- ENA/ENB เป็น PWM Output เพื่อควบคุมความเร็วมอเตอร์.
- การแปลงค่าจาก Joystick:
- แปลงค่าที่อ่านได้จาก Joystick (0-4095) เป็นช่วง -255 ถึง 255 เพื่อใช้ควบคุมความเร็วและทิศทางของมอเตอร์.
- การคำนวณความเร็วของล้อ:
- ความเร็วของล้อซ้าย =
speedY + speedX(ไปข้างหน้า + เลี้ยว). - ความเร็วของล้อขวา =
speedY - speedX(ไปข้างหน้า – เลี้ยว).
- ความเร็วของล้อซ้าย =
- การควบคุมทิศทางมอเตอร์:
- หากค่าความเร็วเป็นบวก: หมุนไปข้างหน้า.
- หากค่าความเร็วเป็นลบ: หมุนถอยหลัง.
- หากความเร็วเป็น 0: หยุดล้อ.
ข้อแนะนำ
- การจ่ายไฟให้กับ L298N:
- L298N ต้องการไฟเลี้ยงที่เสถียร (5V สำหรับวงจร และ 7.4V-12V สำหรับมอเตอร์).
- ใช้แบตเตอรี่ LiPo 2S (7.4V) หรือ 3S (11.1V) ตามความเหมาะสมของมอเตอร์.
- การปรับความเร็ว:
- หากความเร็วสูงเกินไปหรือตอบสนองเร็วเกินไป ให้ปรับช่วงการแปลงค่าในฟังก์ชัน
map()เช่นmap(xValue, 0, 4095, -150, 150).
- หากความเร็วสูงเกินไปหรือตอบสนองเร็วเกินไป ให้ปรับช่วงการแปลงค่าในฟังก์ชัน
- การเชื่อมต่อ L298N กับมอเตอร์:
- ตรวจสอบสายไฟของมอเตอร์ว่าเชื่อมต่อกับ L298N ถูกต้องหรือไม่.
- ข้อควรระวังเรื่องความร้อน:
- L298N อาจเกิดความร้อนสูงเมื่อใช้งานเป็นเวลานาน ควรติดฮีทซิงค์หรือใช้พัดลมระบายความร้อน.
- การ Debug:
- ใช้ Serial Monitor เพื่อดูค่าที่อ่านได้จาก Joystick และค่าความเร็วของล้อในแต่ละทิศทาง.
ข้อควรระวัง
- กำลังไฟของมอเตอร์:
- ตรวจสอบว่ามอเตอร์กินกระแสไม่เกิน 2A ต่อช่อง (ซึ่งเป็นขีดจำกัดของ L298N).
- การต่อพินผิด:
- ต่อพิน IN1, IN2, IN3, IN4 ให้ตรงกับตำแหน่งที่กำหนดในโค้ด.
- การใช้แบตเตอรี่:
- หากใช้แบตเตอรี่ LiPo ควรตรวจสอบแรงดันไฟฟ้าอย่างสม่ำเสมอเพื่อป้องกันแบตเตอรี่เสียหาย.
- ความปลอดภัยในการทดสอบ:
- ในการทดสอบครั้งแรก ควรยกตัวรถขึ้นเพื่อหลีกเลี่ยงการเคลื่อนที่ผิดพลาดจนเกิดอุบัติเหตุ
//version3
//V2
// กำหนดพินที่ใช้
const int IN1 = 32;
const int IN2 = 33;
const int IN3 = 25;
const int IN4 = 26;
const int ENA = 14;
const int ENB = 12;
void setup() {
// กำหนดพินที่ใช้เป็น OUTPUT
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
// ตั้งค่าเริ่มต้นให้มอเตอร์หยุด
stopMotors();
}
void loop() {
// เรียกใช้งานฟังก์ชันควบคุมทิศทางและความเร็ว
forward(255); // เดินหน้า ความเร็วสูงสุด
delay(5000); // วิ่ง 5 วินาที
backward(128); // ถอยหลัง ความเร็วปานกลาง
delay(5000); // วิ่ง 5 วินาที
turnRight(255, 128); // เลี้ยวขวา ล้อซ้ายความเร็วสูงสุด ล้อขวาความเร็วปานกลาง
delay(5000); // เลี้ยว 5 วินาที
turnLeft(128, 255); // เลี้ยวซ้าย ล้อซ้ายความเร็วปานกลาง ล้อขวาความเร็วสูงสุด
delay(5000); // เลี้ยว 5 วินาที
stopMotors(); // หยุดมอเตอร์
while (true); // หยุดโปรแกรม
}
// ฟังก์ชันเดินหน้า
void forward(int speed) {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(ENA, speed);
analogWrite(ENB, speed);
}
// ฟังก์ชันถอยหลัง
void backward(int speed) {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(ENA, speed);
analogWrite(ENB, speed);
}
// ฟังก์ชันเลี้ยวขวา
void turnRight(int speedLeft, int speedRight) {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(ENA, speedLeft);
analogWrite(ENB, speedRight);
}
// ฟังก์ชันเลี้ยวซ้าย
void turnLeft(int speedLeft, int speedRight) {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(ENA, speedLeft);
analogWrite(ENB, speedRight);
}
// ฟังก์ชันหยุดมอเตอร์
void stopMotors() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
analogWrite(ENA, 0);
analogWrite(ENB, 0);
}
Link:https://howtomechatronics.com/tutorials/arduino/arduino-dc-motor-control-tutorial-l298n-pwm-h-bridge/
https://www.indiamart.com/proddetail/l298n-based-motor-driver-module-2851214231830.html