PMS5003 คืออะไร
PMS5003 (Plantower PMS5003 G5) เป็นเซ็นเซอร์ตรวจวัดฝุ่นละอองในอากาศ (Laser Particle Sensor) ที่ได้รับความนิยมอย่างมากในงานด้าน IoT, Smart Home, Smart City และระบบตรวจวัดคุณภาพอากาศ เนื่องจากมีขนาดเล็ก ราคาไม่สูง ติดตั้งง่าย และสามารถวัดค่าฝุ่นละอองได้แบบ Real-time ผ่านการสื่อสารแบบ UART
ภายในตัวเซ็นเซอร์ประกอบด้วย
- Laser Diode
- Photodiode Receiver
- พัดลมดูดอากาศ (Fan)
- ห้องวัด (Measurement Chamber)
- Microprocessor สำหรับประมวลผลข้อมูล
เซ็นเซอร์จะดูดอากาศเข้าไปในห้องวัด จากนั้นยิงลำแสงเลเซอร์ผ่านอากาศ เมื่อฝุ่นละอองผ่านลำแสง จะเกิดการกระเจิงของแสง (Laser Scattering) เซ็นเซอร์จะตรวจจับแสงที่สะท้อนกลับและคำนวณขนาดกับความเข้มข้นของฝุ่นละอองด้วยอัลกอริทึมภายใน ก่อนส่งข้อมูลออกทาง UART เป็นค่าดิจิทัลพร้อมใช้งาน
หลักการทำงาน (Laser Scattering Principle)
Air Inlet
│
▼
┌────────────┐
│ Cooling Fan│
└─────┬──────┘
│
▼
┌───────────────────┐
│ Laser Diode │
│ ●──────────►│
│ │
│ Dust Particle │
│ ○ │
│ ╱ │
│ ╱ │
│ Photodiode │
└───────────────────┘
│
▼
Digital Processing
│
▼
UART Output
PM1.0
PM2.5
PM10ข้อดีของเทคนิค Laser Scattering คือสามารถตรวจจับฝุ่นขนาดเล็กได้ละเอียดกว่าวิธีแบบอินฟราเรดทั่วไป และตอบสนองต่อการเปลี่ยนแปลงของสภาพอากาศได้รวดเร็ว
ข้อมูลที่ PMS5003 สามารถวัดได้
เซ็นเซอร์สามารถรายงานข้อมูลหลายชนิด เช่น
| รายการ | ความหมาย |
|---|---|
| PM1.0 | ฝุ่นขนาดไม่เกิน 1 ไมครอน |
| PM2.5 | ฝุ่นขนาดไม่เกิน 2.5 ไมครอน |
| PM10 | ฝุ่นขนาดไม่เกิน 10 ไมครอน |
| Particle Count | จำนวนอนุภาคหลายช่วงขนาด (0.3, 0.5, 1.0, 2.5, 5.0 และ 10 µm) ต่อปริมาตรอากาศ (ขึ้นอยู่กับข้อมูลที่อ่านจากแพ็กเก็ต UART) |
Specifications
| รายการ | ค่า |
|---|---|
| รุ่น | PMS5003 G5 |
| ผู้ผลิต | Plantower |
| หลักการวัด | Laser Scattering |
| ช่วงการวัด | 0–500 µg/m³ |
| ความละเอียด | 1 µg/m³ |
| ขนาดอนุภาคต่ำสุดที่ตรวจจับได้ | 0.3 µm |
| Accuracy | ±10 µg/m³ (0–100 µg/m³), ±10% (100–500 µg/m³) |
| Response Time | <10 วินาที |
| Interface | UART TTL |
| Baud Rate | 9600 bps |
| Data Bits | 8 |
| Stop Bits | 1 |
| Parity | None |
| แรงดันไฟเลี้ยง | 5V DC |
| กระแสทำงาน | ประมาณ 100–120 mA |
| ขนาด | ประมาณ 50 × 38 × 21 มม. |
| อายุการใช้งาน | มากกว่า 3 ปี (ใช้งานต่อเนื่อง) |
ขาเชื่อมต่อ (Pinout)
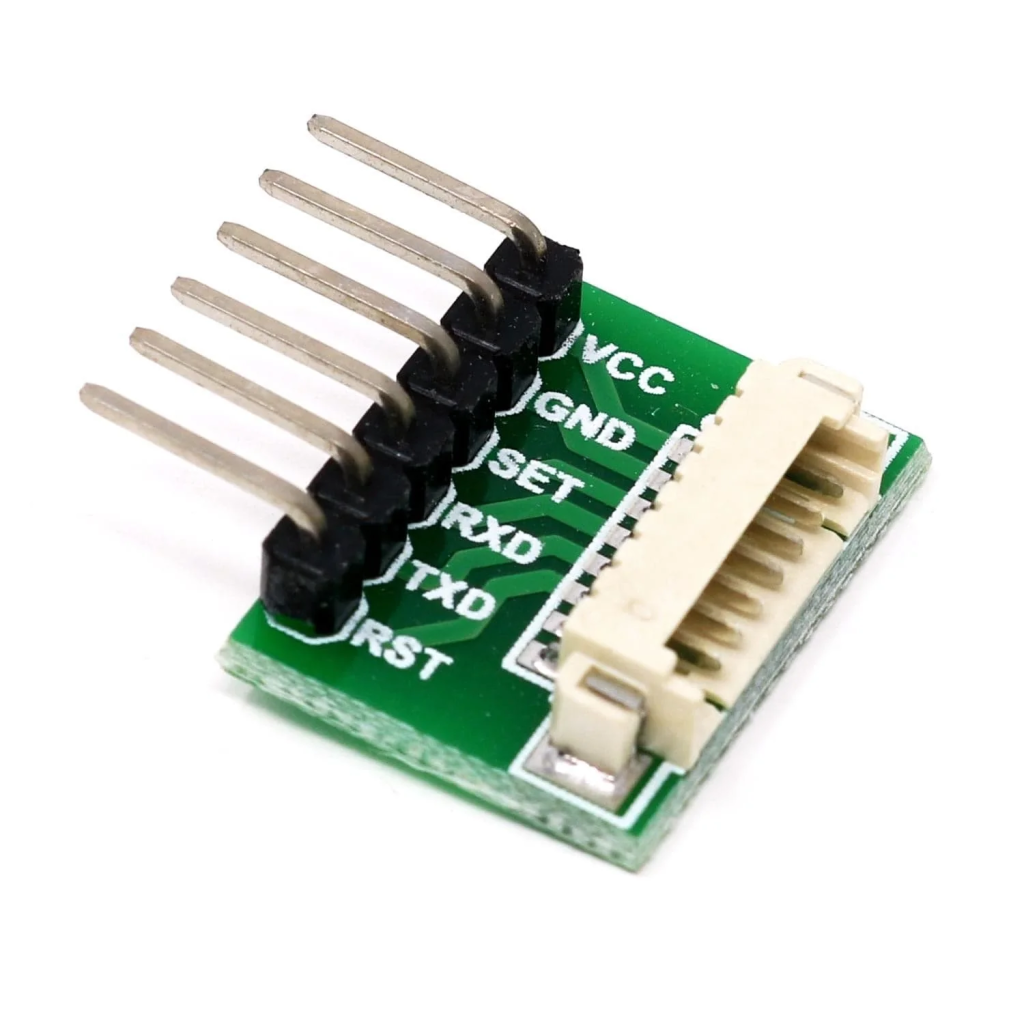
| Pin | หน้าที่ |
|---|---|
| VCC | 5V |
| GND | Ground |
| TXD | ส่งข้อมูลออกจากเซ็นเซอร์ |
| RXD | รับคำสั่งจาก MCU (Sleep/Wake, Passive Mode) |
| SET | เลือกโหมด Active/Passive (บางรุ่น) |
| RESET | รีเซ็ตเซ็นเซอร์ (บางรุ่น) |
โดยทั่วไปสำหรับ ESP32 จะใช้เพียง VCC, GND, TXD และ RXD ก็เพียงพอ
จุดเด่นของ PMS5003
- ใช้เลเซอร์ ทำให้ความแม่นยำสูงกว่าเซ็นเซอร์ฝุ่นแบบ LED
- มีพัดลมดูดอากาศในตัว
- ส่งข้อมูลเป็นดิจิทัล ไม่ต้องแปลงค่า Analog
- เชื่อมต่อกับ ESP32, ESP8266, Arduino, Raspberry Pi ได้ง่าย
- วัดค่าได้แบบ Real-time
- รองรับการทำงานต่อเนื่อง 24 ชั่วโมง
- มีอัลกอริทึมชดเชยผลกระทบจากสภาพแวดล้อมภายในตัวเซ็นเซอร์
ข้อจำกัด
แม้ PMS5003 จะเป็นเซ็นเซอร์ที่มีประสิทธิภาพสูง แต่ก็มีข้อจำกัดที่ควรทราบ
- ไม่สามารถตรวจวัดก๊าซ เช่น CO₂, CO, NH₃, NO₂ หรือ VOC ได้
- ค่าที่รายงานเป็นค่าประมาณจากการกระเจิงของแสง ไม่ใช่เครื่องมืออ้างอิงระดับห้องปฏิบัติการ
- ความชื้นสูงอาจทำให้ค่าฝุ่นสูงกว่าความเป็นจริง เนื่องจากละอองน้ำกระเจิงแสงคล้ายฝุ่น
- พัดลมและเลเซอร์มีการสึกหรอตามอายุการใช้งาน
การประยุกต์ใช้งาน
PMS5003 เหมาะกับงานด้านต่าง ๆ ดังนี้
1. Smart Home
- ตรวจวัด PM2.5 ภายในบ้าน
- ควบคุมเครื่องฟอกอากาศอัตโนมัติ
- แจ้งเตือนผ่านแอปพลิเคชัน
2. Smart City
- สถานีตรวจวัดคุณภาพอากาศ
- เครือข่ายเซ็นเซอร์ IoT
- แผนที่คุณภาพอากาศแบบ Real-time
3. Smart Agriculture
- ตรวจคุณภาพอากาศในโรงเรือน
- ตรวจฝุ่นในฟาร์มปศุสัตว์
- ควบคุมระบบระบายอากาศ
4. โรงงานอุตสาหกรรม
- ตรวจฝุ่นในพื้นที่ผลิต
- เฝ้าระวังฝุ่นจากกระบวนการผลิต
- แจ้งเตือนเมื่อค่าฝุ่นเกินมาตรฐาน
5. งานวิจัยและการศึกษา
- โครงงาน Arduino
- โครงงาน ESP32
- งาน IoT
- งาน AIoT
- ระบบ Smart Environment
6. ระบบ AI และ Cloud
- ส่งข้อมูลไปยัง MQTT
- บันทึกข้อมูลลงฐานข้อมูล
- วิเคราะห์แนวโน้มด้วย AI
- พยากรณ์คุณภาพอากาศ
/*
==========================================
PMS5003 Air Quality Test V1.0
ESP32-S3 + KY-016 RGB LED
==========================================
*/
#include <HardwareSerial.h>
HardwareSerial pmsSerial(2);
// UART
#define PMS_RX 16
#define PMS_TX 17
// RGB LED
#define RED_PIN 25
#define GREEN_PIN 26
#define BLUE_PIN 27
uint16_t pm1 = 0;
uint16_t pm25 = 0;
uint16_t pm10 = 0;
void setup() {
Serial.begin(115200);
pmsSerial.begin(9600, SERIAL_8N1, PMS_RX, PMS_TX);
pinMode(RED_PIN, OUTPUT);
pinMode(GREEN_PIN, OUTPUT);
pinMode(BLUE_PIN, OUTPUT);
setColor(false, false, false);
Serial.println();
Serial.println("=================================");
Serial.println(" PMS5003 Air Quality Monitor");
Serial.println("=================================");
}
void loop() {
if (readPMS()) {
Serial.println("--------------------------------");
Serial.print("PM1.0 : ");
Serial.print(pm1);
Serial.println(" ug/m3");
Serial.print("PM2.5 : ");
Serial.print(pm25);
Serial.println(" ug/m3");
Serial.print("PM10 : ");
Serial.print(pm10);
Serial.println(" ug/m3");
Serial.print("Status : ");
showAQI(pm25);
Serial.println("--------------------------------");
Serial.println();
}
}
//////////////////////////////////////////////////////////////
bool readPMS() {
if (pmsSerial.available() < 32)
return false;
if (pmsSerial.read() != 0x42)
return false;
if (pmsSerial.read() != 0x4D)
return false;
uint8_t buffer[30];
pmsSerial.readBytes(buffer, 30);
uint16_t checksum = 0x42 + 0x4D;
for (int i = 0; i < 28; i++)
checksum += buffer[i];
uint16_t received =
(buffer[28] << 8) | buffer[29];
if (checksum != received)
return false;
pm1 =
(buffer[8] << 8) | buffer[9];
pm25 =
(buffer[10] << 8) | buffer[11];
pm10 =
(buffer[12] << 8) | buffer[13];
return true;
}
//////////////////////////////////////////////////////////////
void showAQI(int value) {
if (value <= 15) {
Serial.println("Excellent");
setColor(false, true, false);
}
else if (value <= 25) {
Serial.println("Good");
setColor(false, true, true);
}
else if (value <= 37) {
Serial.println("Moderate");
setColor(true, true, false);
}
else if (value <= 50) {
Serial.println("Sensitive");
setColor(true, true, true);
}
else if (value <= 90) {
Serial.println("Unhealthy");
setColor(true, false, false);
}
else {
Serial.println("Hazardous");
setColor(true, false, true);
}
}
//////////////////////////////////////////////////////////////
void setColor(bool r, bool g, bool b) {
digitalWrite(RED_PIN, r);
digitalWrite(GREEN_PIN, g);
digitalWrite(BLUE_PIN, b);
}